关于无人机你必须了解的常识 (1)
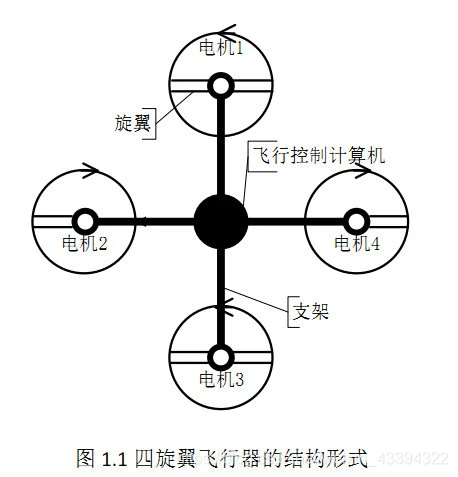
1.由于无人机采用的是空气对流从而产生升力,因此,无人机相邻两个电机的旋转方向必然相反。
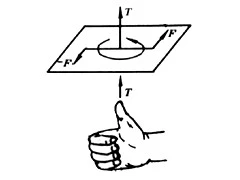
2.按照右手螺旋定则,右手握拳,四指握拢的方向为桨叶旋转方向,则,竖起的大拇指为拉力的方向。
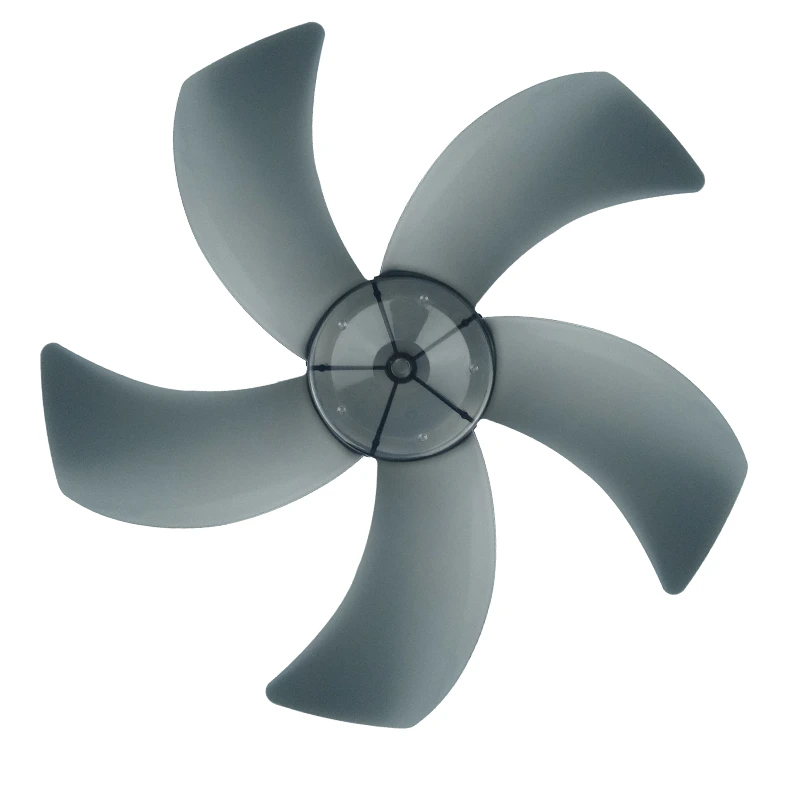
3.风扇扇叶凹陷进去的一面为出风方向。
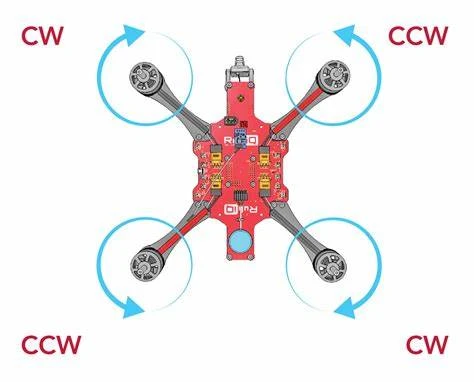
4.在电机转向上,我们将逆时针旋转称为CCW,顺时针旋转叫CW。我们将安装在CCW转向电机上的桨叶称为正桨,安装在CW转向电机上的桨叶称为反桨。
5.无人机机头超前,我们将右前机臂称为M1机臂,由于不同的品牌飞控和电调对电机顺序的定义不同,因此当前市场上呈现多种命名方式。
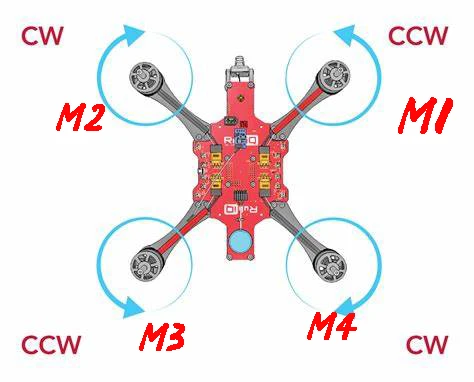
(1)以大疆为代表的逆时针命名法:
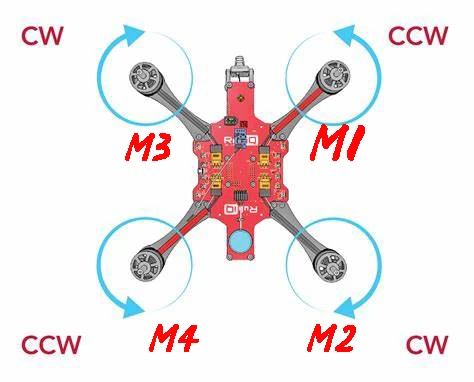
(2)多数穿越机所采用的顺时针命名法:
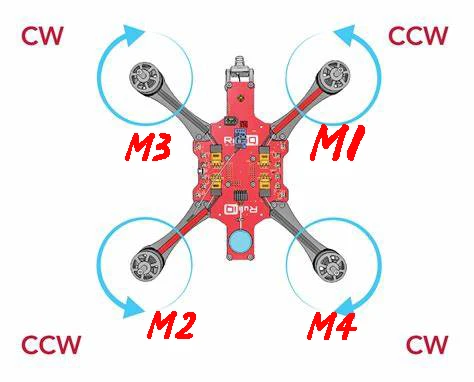
(3)多数多旋翼无人机教科书采用的对角线命名法:
6.由于厂商对电机顺序的定义不同,因此自组装无人机时务必查看飞控和电调说明书,谨防装反或装错位置而造成炸机。
阅读剩余
版权声明:
作者:admin
链接:https://500m.gstnt.com/archives/69
文章版权归作者所有,未经允许请勿转载。
THE END